ARLISSって??
ARLISSとは,小型人工衛星や小型地上探査機ローバーの開発を目的としたサブオービタル衛星打上実証実験です.学生が宇宙開発技術の基礎研究を競うコンペティションであり,アメリカ合衆国ネバダ州ブラックロック砂漠にて毎年開催されています.
髙玉研究室は,ロケットから放出された小型人工衛星やローバーが,砂漠中の目的地に自律的に降りる/走ることを競うカムバックコンペティションと自ら定めたミッションを自律制御によって達成するミッションコンペティションに参加しています.

2023年度ARLISS
自律的に給電する自律給電ローバーを開発する「PrT」チームと,”移動”と”探索”のための分離可能な4WDローバを開発する「Gemini」チームの2チームで活動しました.
PrT
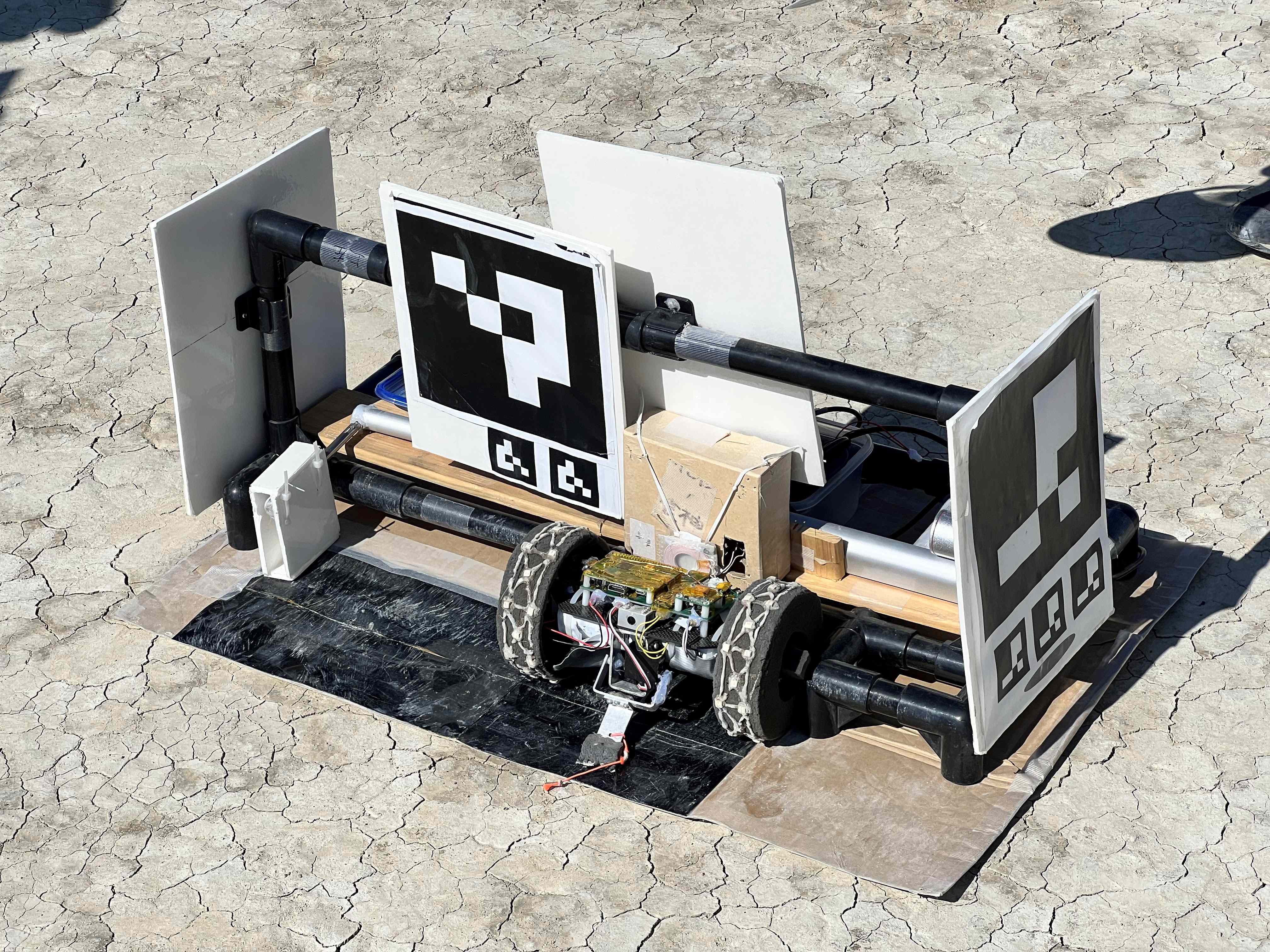
私たちPrTは「自律給電ローバーの開発」を目指し,ローバー・給電基地の開発をしました.充電はコイルを使った電磁誘導方式で実施します.ローバーはコイルを搭載し,給電基地はアクチュエータ(上下に伸び縮みする棒),ARマーカー,コイルを搭載しています.大きく3つのステップで自律給電を実現します.1つ目はGPSを使用した給電基地周辺の誘導,2つ目はARマーカーを使用したコイル周辺の誘導,3つ目がアクチュエータを使用したコイルの位置調整です.アクチュエータはローバーとのBluetooth通信で操作します.本番では,給電と探索を3回繰り返し,0mゴールを目指します.
アメリカでの打ち上げは成功し,着地破損なし,パラシュート切り離し成功,3回の給電と探索,さらに0mゴールをすべて達成しました!Accuracy Award 1位とOverall Winnerを獲得することができました!!走行開始からゴールまでの時間は1h55mと長時間の稼働でした.無事ミッションを達成できてよかったです.
(PrT リーダー植木 駿介)
Gemini
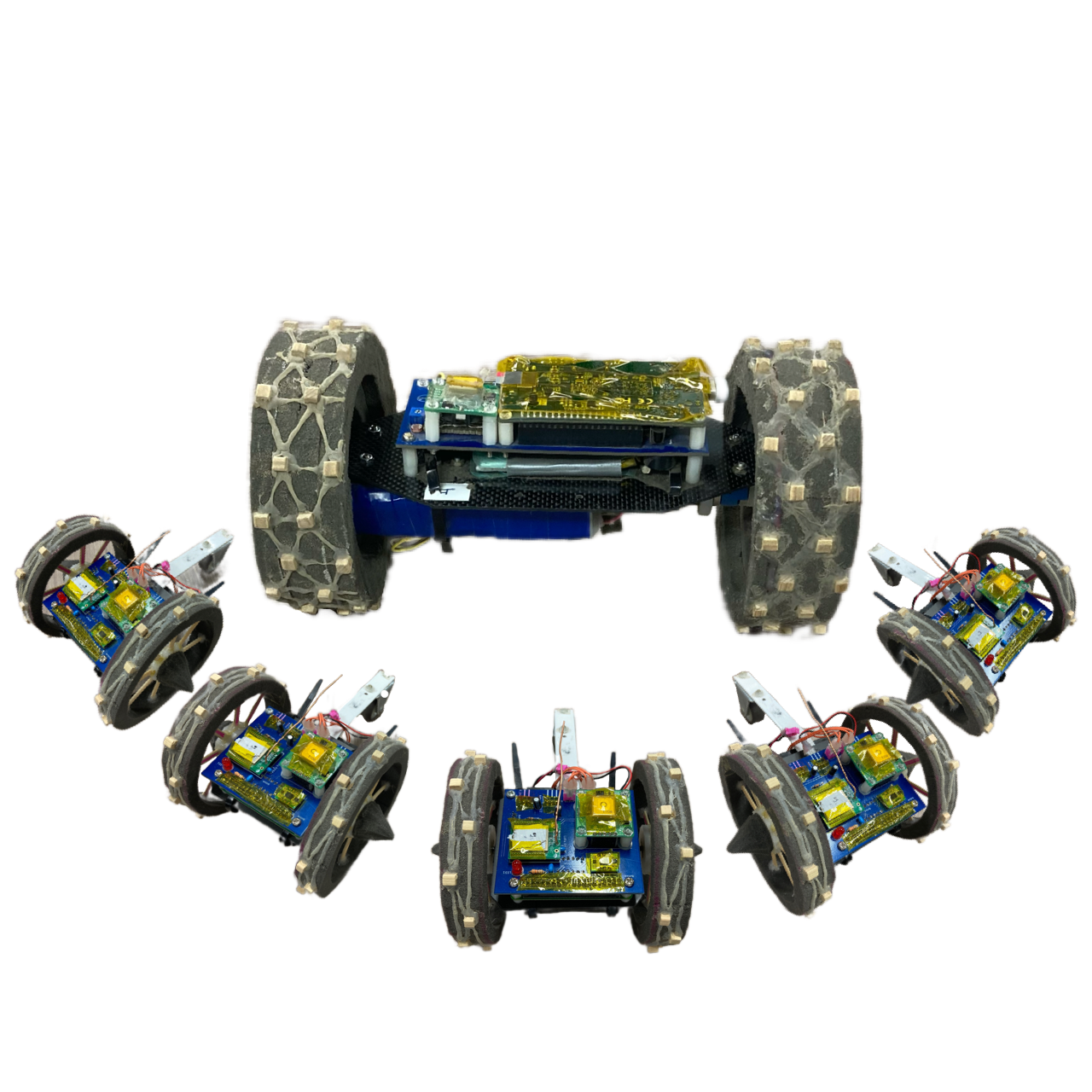
- 探査機に必要な”移動”と”探索”の能力を両立するため,多輪駆動の走行性能とマルチローバによる探索能力に着目し,前輪側と後輪側に分離可能な4WDローバを開発することでその解決を図った.
- マルチローバ+特殊機構ということで,ハードウェア,ソフトウェアともに限られたリソースの中での限界に挑戦したチームでもある.
2022年度ARLISS
親機と子機に分かれ,先行する子機の走行データをもとに安全なルートを導いて走行する「Dolphins」チームと,GPSを使わず,ホイールオドメトリや外部のアンテナとの通信強度をもとにゴールを目指す「Hodr」チームの2チームで活動しました.
2022年度:Dolphins
私たちDolphinsは「親機が子機群を用いて広域未踏のエリアを安全に探索する手法」の確立を目指し,機体の開発をしました.ミッションに挑むにあたって,高玉研では過去に3台以上の同時自律探索をしたノウハウがないことから,開発は難航を極めました.機体をかなり大量に作らなければならないのでスケジュール感を詰めたり,機体のコストをなるべく安く抑えられるようにするなどのハード面の工夫や,相互通信を確実に行うためのアルゴリズムの工夫など実現までの道のりは遠く,ほぼ毎日機体の開発をする日々でした.メンバー全員が連日の実験で試行錯誤しながらどうすればよくなるかを常に考え実行し改善を積み重ねていきました.
アメリカでは,度重なるトラブルから子機3機+親機1機でのトライとなりました.1回目のトライでは,打ち上げた親機が風にあおられてタイヤが取れてしまいましたが,2回目のトライで修正をして子機と親機の通信+子機が探索を開始するところまでこぎつけました.めちゃめちゃ大変でしたが一生忘れない良い経験になったと思います.(Dolphins リーダー 戸板 佳祐)
2022年度:Hodr
私たちHodrはオドメトリ&電波強度による位置推定と画像による角度推定を用いたGPSレスローバーをミッションに掲げました.
未知の惑星では衛星が飛んでいないことからGPSによる位置推定ができないことや,地磁気が存在しない惑星では地磁気による角度推定が行えません.それらを打破するための野心的なミッションでした.
受賞歴
- 2023年
- ARLISS
- Accuracy Award 1st (PrT)
- Overall winner 総合第1位 (PrT)
- Unisec award 1st (Gemini)
- Best Mission award 2nd (Gemini)
- ARLISS
- 2022年
- ARLISS
- Technical System Award 2nd (Dolphinsチーム)
- UNISEC WS
- ポスター賞 3位
- ARLISS
- 2021年
- ACTS(ARLISS代替大会):
- Accuracy Award 3rd (Salamanderチーム)
- ACTS(ARLISS代替大会):
- 2020年
- ACTS(ARLISS代替大会):
- Overall Winner 総合第1位 (SolaMilチーム)
- Accuracy Award 3rd(SolaMilチーム)
- Overall Winner 総合第2位 (Hopesチーム)
- プロフェッショナル部門 1st(Hopesチーム)
- ACTS(ARLISS代替大会):
- 2019年
- ARLISS:
- Overall Winner 総合第2位 (Siriusチーム)
- Accuracy Award 3rd(Siriusチーム)
- Technical System Award 1st(Tadpoleチーム)
- 能代宇宙イベント:
- タイプエス賞 優勝(Tadpoleチーム)
- UNISEC WS:ポスター賞 優勝
- 学生表彰
- ARLISS:
- 2018年
- ARLISS:
- Accuracy Award 1st (Aresチーム)
- Technology Comeback Award 2nd(Aresチーム)
- Mission Award 3rd(Aresチーム)
- UNISEC Award(MICHIBIKIチーム)
- 能代宇宙イベント:
- タイプエスミッション部門 優勝(Aresチーム)
- UNISEC WS:
- ポスター賞 優勝
- 学生表彰
- ARLISS:
- 2017年
- 能代宇宙イベント:
- ミッション部門能代CanSat大賞(Mulcheeseチーム)
- 市民ポスター展 第1位(Mulcheeseチーム)
- UNISEC WS:
- ポスター賞 優勝
- 学生表彰
- 能代宇宙イベント:
- 2016年
- ARLISS:
- Technology Award (Ground Locomotion Mechanism) 1st (Cake’sチーム)
- Accuracy Award 2nd(Cake’sチーム)
- UNISEC Award(HighBallチーム)
- UNISEC WS:
- 団体発表賞 第1位ポスター賞 第2位
- 学生表彰
- ARLISS:
- 2015年
- ARLISS:
- Accuracy Award (GAIAチーム)
- Technology Award Comeback Algorithm(GAIAチーム)
- Technology Award Ground Locomotion Mechanism(GAIAチーム)
- Best Mission Award AXELSPACE CUP 優勝 (HighBallチーム)
- UNISEC WS:
- 団体発表賞 優勝ポスター賞 優勝
- 学生表彰
- ARLISS:
- 2014年
- ARLISS:
- Precision Award(MINERVAチーム)
- Coolest Award(CASSYチーム)
- UNISEC WS:
- ポスター賞 優勝
- 学生表彰
- ARLISS:
- 2013年
- ARLISS:
- カムバックコンペ優勝
- 学生表彰
- ARLISS:
- 2012年
- ARLISS:
- カムバックコンペ優勝
- ミッションコンペ優勝
- 学生表彰
- ARLISS:
- 2011年
- ARLISS:
- カムバックコンペ第2位,第3位
- 学生表彰
- ARLISS:
- 2009年
- ARLISS:
- カムバックコンペ優勝
- ミッションコンペ第2位
- ARLISS:
ARLISSの歴史
- ARLISS 2017
- 高い走破性と新しい機体形状の開発を目標に折りたたみ式4WDローバを開発した。
- 手裏剣型後輪タイヤのアシストや折りたたみ式という4輪の特色を活かし、様々なタイプの轍における脱出を可能にした。
- (〇八工房チーム)
- 惑星探査時における、センサの故障による探査続行不可能なロスト機の捜索を想定し、協調行動可能な複数ローバを開発した。
- (Mulcheeseチーム)
- ARLISS 2016
- 本年度は従来の二輪ローバータイプではなくARLISS史上初成功一輪クローラー型で圧倒的走破性を誇る機体を開発した。
- 一輪クローラータイプは接地面積が二輪ローバータイプと比べて大きいため,スタックしにくい性質がある。
- また、スマホを搭載したことにより、CanSatにしゃべらせ現状の把握がしやすくなった。(Cake’sチーム)
- ゴールまで走行し続けるために,安全なルートを移動する必要がある。そこで、本年度は画像処理を用いた危機回避アルゴリズムを搭載した機体を開発した.このアルゴリズムにより、轍、悪路、障害物の回避が可能になった。(HighBallチーム)
- ARLISS 2015
- 毎年の課題である轍からの脱出は、事前に全ての状況を想定しアルゴリズムを用意することは困難である。例年、どうしても脱出できないときにはランダム行動に頼ってきたが、本年度は進化的に行動を獲得するローバーとなっており、これまでのものとは一線を画している。(GAIAチーム)
- 子供達にARLISS(CanSat)の楽しさを知ってもらいたいという観点から、ARLISS(CanSat)を軸とした総合学習サービスを提案する。日本からアメリカのローバーを操作できるようにインターネットとWifiを利用した通信の確立、ブラウザ上で誰でも操作できるユーザーフレンドリーなUIを開発した。(HighBallチーム)
- ARLISS 2014
- 昨年度、ふかふかな砂地となっていた轍にハマってしまった経験から、砂地でも走行できるローバーを目指す。尺取り虫の様な動作によって公園の砂場での走行を実現した。さらにカメラによるゴールの認識でピンポイントゴールを行う。(MINERVAチーム)
- 火星でのインターネット構築を想定し、ルータを2台積んだローバーを開発し、砂漠でインターネットを構築する。電波強度を用いることでルータ間が均等になるようにルーターを配置可能である(CASSYチーム)。
- ARLISS 2013
- スポンジの伸縮を利用した拡張タイヤによる高い走破性を実現した。また初めてWebカメラを搭載し、パラシュート検知によるパラシュート絡まり回避行動、さらに轍を検知し避けること、轍内部から抜け道を検出することに挑戦した。本画像処理技術は翌年のゴール検知に活かされている(RIVAIチーム)。
- 初めて複数台(2台)のローバーを搭載したチームである。それぞれGPSをもとにゴールを目指すことができる。ゴールに到達する機能を持たせながらいかに小さく軽くするかを追求したローバーである(Aoiチーム)。
- ARLISS 2012
- 高玉研で初めて2段パラシュートに成功したチームである。またカラーセンサーを積み、パラシュート検知によるパラシュート絡まり回避行動を搭載した。翌年のWebカメラを用いたパラシュート検知ほどの性能ではないが初めてパラシュート検知による回避に挑戦したチームである。(Tequila Sunriseチーム)
- 後日更新(McKinleyチーム)